hello world
我们首先通过hello world来了解cuda这门语言
| |
接下来运行
| |
我们介绍两个基础知识:
- cuda 显存管理
- cuda 线程管理
显存管理:这部分和c的内存管理差不多
| 标准C函数 | CUDA C 函数 | 说明 |
|---|---|---|
| malloc | cudaMalloc | 在CPU/GPU 申请内存 |
| memset | cudaMemset | 为新内存做初始化 |
| memcpy | cudaMemcpy | CPU/GPU之间的数据传输 |
| free | cudaFree | 释放CPU/GPU内存 |
线程管理:解释了«<1,1»>是什么意思
当核函数在主机端(CPU)启动时,在GPU上执行是会产生大量的线程,cuda采取层级结构(grid->block>thread)来管理这些线程
一个kernal可以对应3个维度的grid;同理block;
| |
所以说«<1,1»>就是说这个kernel对应的grid拓扑为(1,1,1),block对应的block拓扑为(1,1,1)
接下来介绍一下具体如何计算线程的索引
| |
两种计算方式的区别可以理解为自底向上(方法1)与自顶向下(方法2)
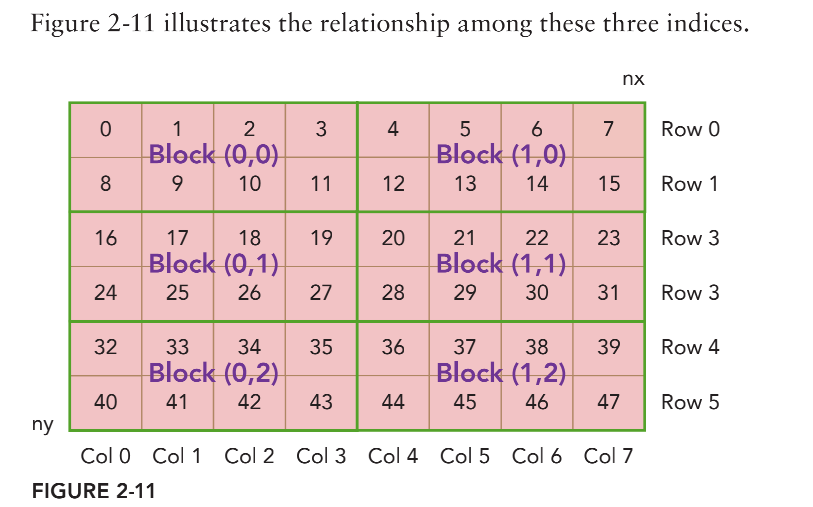
以方法1为例,girdsize=(2,3), blocksize=(4,2),如下图。gridDim=(1,2,3),blockDim=(1,4,2)。对于id=37的thread来说,blockIdx=(0,1,2),threadIdx=(0,1,0);ix=1+14=5,iy=0+22=4,idx=4*8+5=37,正确
实现一个矩阵加法的CUDA核函数
code is here
| |
我们可以用nsight system看一下kernel/cpu执行的timeline
install in unbuntu
| |
结果如下
| |
再补充一点nsight的分析
GPU架构
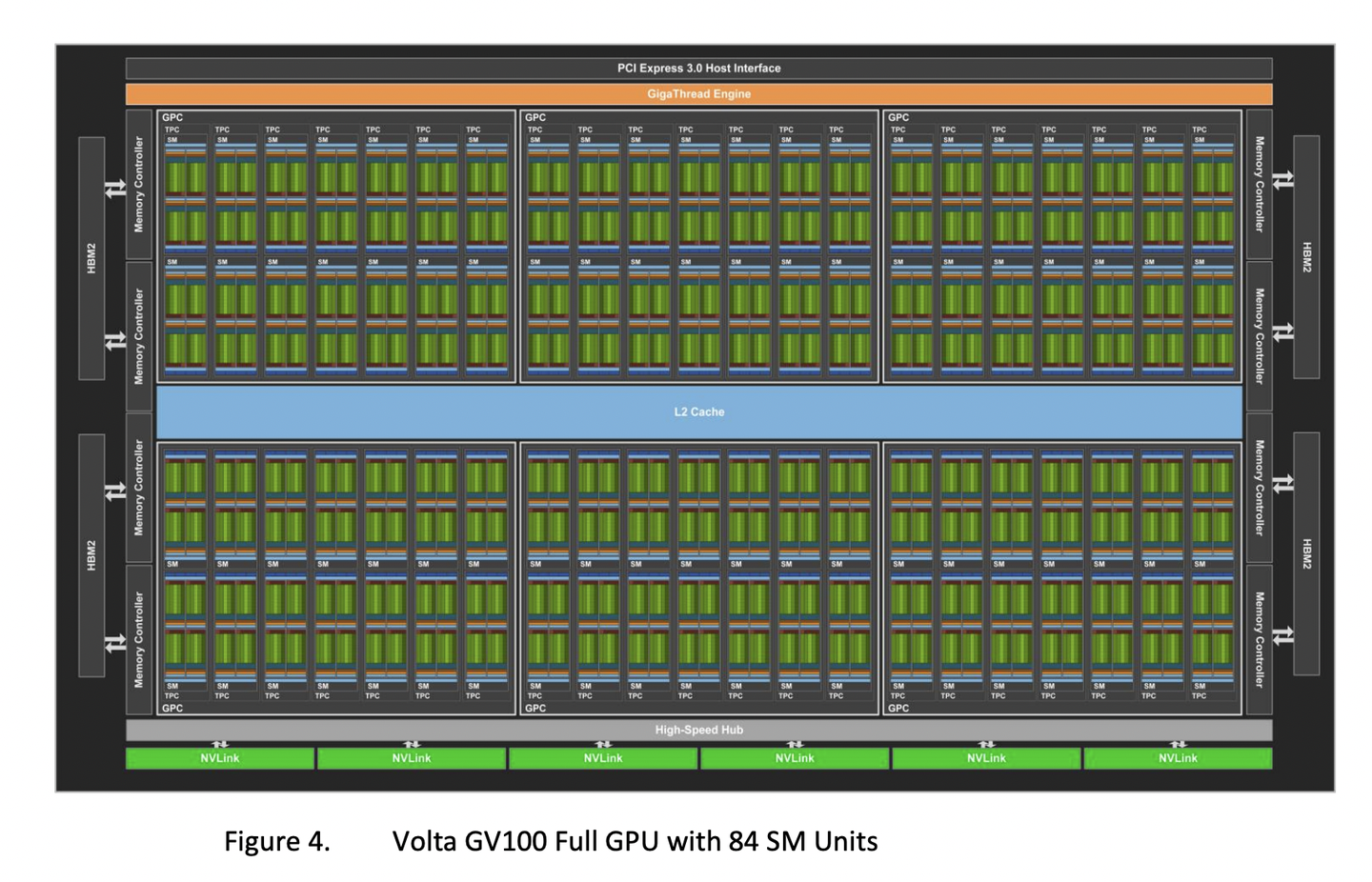
以v100 Volta架构为例,由以下组成:
- PCI-Express Host Interface : 主机接口用于将 GPU 连接到 CPU
- Giga Thread : 全局调度器,用于将线程块分发给 SM 线程调度器
- 核心部分:6个GPC( GPU Processing Clusters),每个GPC里面包含7个TPC(Texture Processing Clusters),每个TPC又包含2个SM(StreamingMultiprocessors)
- L2 Cache:片内所有SM共享
- NVLink :用于多GPU之间的相互连接
- Memory Controller & HBM2:前者作为内存控制器,用于访问HBM2(GPU全局内存,也就是显存,如V100是16G)
GPU里最重要的就是SM,即流处理器
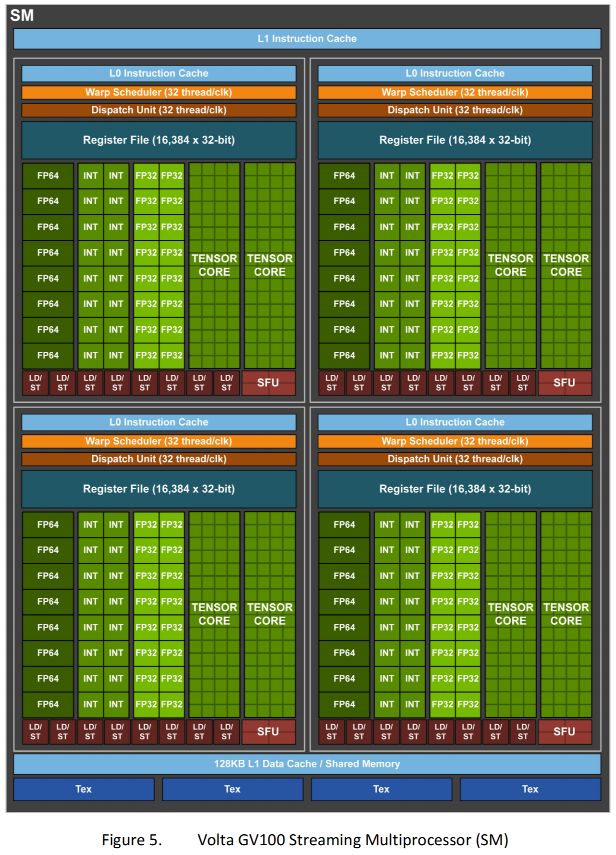
SM被分为4个子块,所有子块共享L1数据cache、L1指令cache,每个子块又由下列组件组成:
- L0 Instruction Cache (指令缓存)
- Warp Scheduler模块负责warp调度,一个warp由32个线程组成,warp调度器的指令通过Dispatch Units送到Core执行。
- Register File(寄存器)
- 8个FP64 CUDA 核心、16个INT CUDA核心、16个FP32 CUDA核心和2个Tensor核心。
- 8个LD/ST Units负责将值加载到内存或者从内存中加载值
- 1个SFU 用来处理sin、cos、求倒数、开平方特殊函数
CUDA 执行流程
当启动内核程序时,GPU接受定义的线程层级结构,并以线程块(block)为单位将线程块分配给多个SM。一旦线程块被调度到一个SM,线程块中的线程会被进一步划分为线程束(warp),每个线程束被调度到一个SM子块执行,线程束中的线程被分配到SM子块上的CORE执行(一对一)。一个线程束(warp)是由32个连续的线程组成,在一个线程束中,所有的线程按照单指令多线程(SIMT)方式执行,即一个线程束中所有的线程在同一周期中必须执行相同的指令。
所以在硬件物理上只有同一线程束中的32个线程是严格并行执行的。同时,正因为硬件总是给一个线程块分配一定数量的线程束,所以在设置内核函数的网格参数(gird)时要尽量保证线程块中线程的数量是线程束中线程数量(32)的整数倍。
同一线程束(warp)中的32个线程是严格并行执行相同指令的,如果cuda程序中出现分支(如if),导致32个线程无法在同一时刻执行相同指令就会出现线程束分化的问题。则只有相同条件的线程会并行执行,其余等待。
- SIMD(单指令多数据),是指对多个数据进行同样操作。非并发性,一个指令,仅需要宽的ALU和较小的控制逻辑,一次操作多个数据。
- SIMT(单指令多线程),想象有这样一个多核系统,每一个core有自己的寄存器文件、自己的ALU、自己的data cache,但是没有独立的instruction cache(指令缓存)、没有独立的解码器、没有独立的Program Counter register,命令是从单一的instruction cache同时被广播给多个SIMT core的。即所有的core是各有各的执行单元,数据不同,执行的命令确是相同的。
cuda 内存结构
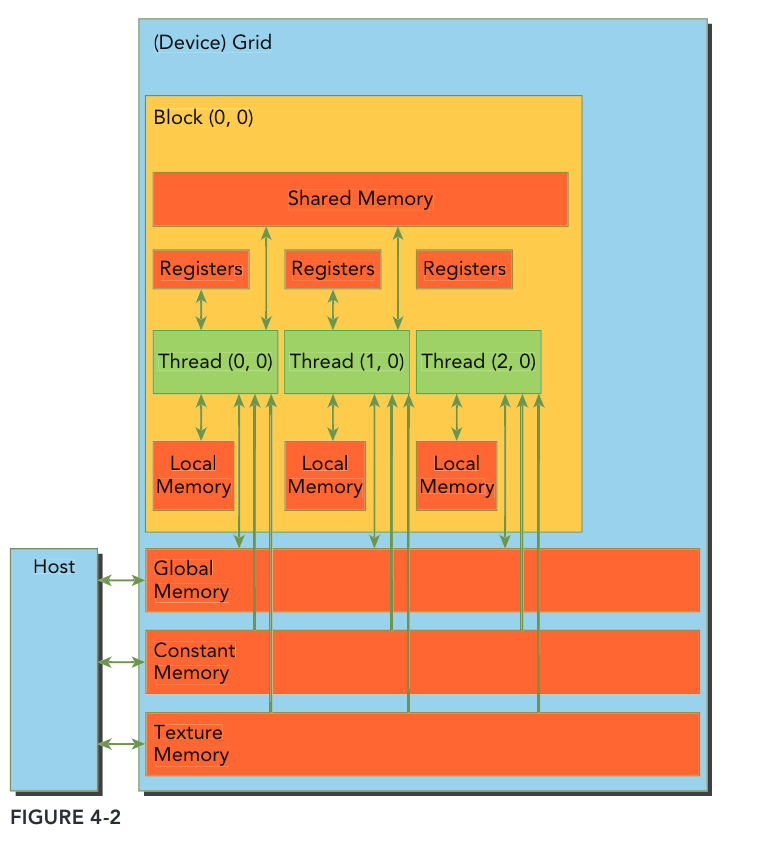
- 寄存器
每个线程私有,数量比CPU的多。当我们在核函数内不加修饰的声明一个变量,此变量就存储在寄存器中,如果一个核函数使用了超过限制的寄存器数量,那么就会用Local memory来帮忙,这称之为寄存器溢出。
声明周期和核函数一致,从开始运行到运行结束,执行完毕后,寄存器就不能访问了。
- Local memory
存放每个线程寄存器溢出的变量
- share memory
在核函数中使用如下修饰符的内存,称之为共享内存: share
每个SM都有一定数量的由线程块分配的共享内存,共享内存跟主存相比,速度要快很多,类似于L1 cache,但是可以被编程。
- 使用共享内存的时候一定要注意,不要过度使用共享内存,如果一个线程块使用的共享内存过多,会导致更多的线程块没办法被SM启动,这样影响活跃的线程束数量。
- 共享内存是线程之间相互通信的基本方式,要避免内存竞争
- constant memory
- 常量内存必须在全局空间内和所有核函数之外进行声明
- 每从一个常量内存中读取一次数据,都会广播给线程束里的所有线程
- texture memory
图形相关,忽略
- global memory
GPU上最大的内存空间,延迟最高,使用最常见的内存
一个全局内存变量可以被静态声明或动态声明。 动态声明就是前面讲过的cudaMalloc的方式,静态声明要使用__device__来修饰